

رباتها با بهرهگیری از هوش مصنوعی BrainBody-LLM میتوانند مانند انسان فکر و عمل کنند
تصور کنید رباتی وجود داشته باشد که صرفاً به اجرای فرمانها بسنده نکند، بلکه همانند انسان برای انجام کارهای خود برنامهریزی کند، در لحظه حرکاتش را اصلاح نماید و از بازخوردها بیاموزد

تصور کنید رباتی وجود داشته باشد که صرفاً به اجرای فرمانها بسنده نکند، بلکه همانند انسان برای انجام کارهای خود برنامهریزی کند، در لحظه حرکاتش را اصلاح نماید و از بازخوردها بیاموزد. این موضوع شاید دور از ذهن به نظر برسد، اما پژوهشگران دانشکده مهندسی تاندون دانشگاه نیویورک (NYU Tandon School of Engineering) با ارائه الگوریتم جدیدی با نام BrainBody-LLM به چنین تواناییهایی دست یافتهاند.
تا پیش از این، یکی از چالشهای اصلی در رباتیک، ایجاد سامانههایی بود که بتوانند در محیطهای پیشبینیناپذیر، وظایف پیچیده را با انعطافپذیری کامل انجام دهند. روشهای سنتی برنامهنویسی رباتها یا حتی برنامهریزهای مبتنی بر مدلهای زبانی بزرگ (LLM)، غالباً با این مشکل روبهرو بودند که برنامههایی تولید میکردند که با توان واقعی ربات سازگاری کامل نداشت. BrainBody-LLM این چالش را با استفاده از مدلهای زبانی بزرگ که همان فناوری مورد استفاده در ChatGPT هستند برطرف میکند تا بتواند برنامهریزی و اصلاح مداوم اقدامات ربات را مدیریت نماید؛ قابلیتی که میتواند در آینده به ساخت ماشینهایی هوشمندتر و سازگارپذیرتر منجر شود.
الگوریتم BrainBody-LLM از ارتباط میان مغز و بدن انسان هنگام حرکت الهام گرفته است. این الگوریتم از دو بخش اصلی تشکیل میشود: بخش نخست، Brain LLM است که مسئول برنامهریزی سطحبالا بوده و وظایف پیچیده را به مراحل کوچکتر و قابل مدیریت تقسیم میکند. بخش بعدی، Body LLM است که این مراحل را به دستورهای مشخص برای عملگرهای ربات تبدیل میکند تا حرکات دقیق ایجاد شود.
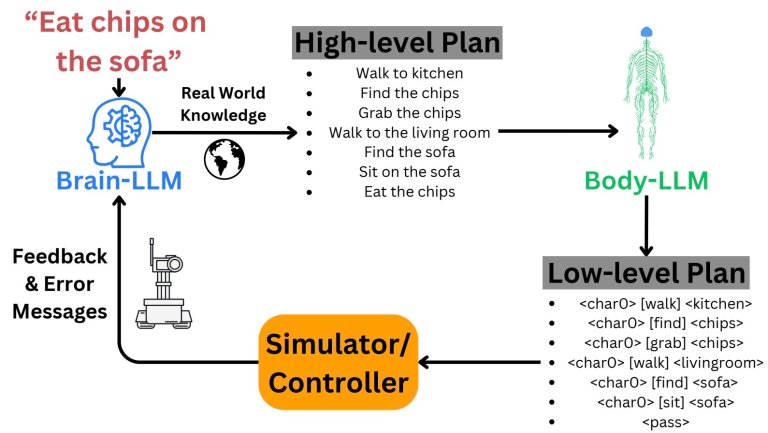 یکی از ویژگیهای کلیدی BrainBody-LLM وجود سامانه بازخورد حلقه بسته است؛ بدین معنا که ربات بهطور پیوسته اعمال خود و وضعیت محیط را پایش کرده و سیگنالهای خطا را به مدلهای زبانی بازمیگرداند تا کل سامانه بتواند خطاها را در زمان واقعی اصلاح و رفتار خود را تنظیم کند.
یکی از ویژگیهای کلیدی BrainBody-LLM وجود سامانه بازخورد حلقه بسته است؛ بدین معنا که ربات بهطور پیوسته اعمال خود و وضعیت محیط را پایش کرده و سیگنالهای خطا را به مدلهای زبانی بازمیگرداند تا کل سامانه بتواند خطاها را در زمان واقعی اصلاح و رفتار خود را تنظیم کند.
وینیت بهات، نویسنده پژوهش و دانشجوی دکتری در NYU Tandon، بیان میکند که مزیت اصلی BrainBody-LLM در معماری حلقه بسته آن است که موجب تعامل پویای اجزای LLM میشود و امکان مدیریت مقاوم وظایف پیچیده و چالشبرانگیز را فراهم میآورد.




برای آزمودن این رویکرد، پژوهشگران ابتدا شبیهسازیهایی را در محیط VirtualHome انجام دادند؛ جایی که یک ربات مجازی به انجام کارهای خانگی میپرداخت. سپس آزمایش روی یک بازوی رباتیک واقعی با نام فرانکا ریسرچ ۳ انجام شد. BrainBody-LLM در مقایسه با روشهای پیشین بهبود واضحی نشان داد و در شبیهسازیها نرخ تکمیل وظایف را تا حدود ۱۷ درصد افزایش داد. در آزمایشهای انجامشده روی ربات فیزیکی نیز، بیشتر وظایف با موفقیت به پایان رسید که توانایی این الگوریتم را در مواجهه با پیچیدگیهای دنیای واقعی نشان میدهد.
BrainBody-LLM این ظرفیت را دارد که نحوه استفاده از رباتها را در خانهها، بیمارستانها، کارخانهها و محیطهایی که ماشینها باید وظایف پیچیده را با انعطافپذیری نزدیک به انسان انجام دهند دگرگون کند. این روش میتواند الهامبخش سامانههای آینده هوش مصنوعی باشد که تواناییهای بیشتری مانند بینایی سهبعدی، حس عمق و کنترل همزمان مفاصل را ترکیب میکنند تا رباتها با طبیعیترین و دقیقترین شکل ممکن حرکت کنند.
با وجود این، این فناوری هنوز برای بهکارگیری گسترده آماده نیست. تاکنون این سامانه تنها با مجموعهای محدود از دستورها و در محیطهای کنترلشده آزموده شده است. به همین دلیل ممکن است در شرایط واقعی که باز و بهسرعت در حال تغییر هستند با دشواریهایی روبهرو شود.
پژوهشگران اعلام کردهاند که در ادامه، کار روی بهرهگیری از انواع حسگرهای گوناگون برای ایجاد بازخورد غنیتر را دنبال خواهند کرد تا بتوانند الگوریتمهای برنامهریزی مبتنی بر LLM را برای استقرار ایمن و قابلاعتماد در کاربردهای واقعی رباتیک بهبود دهند.
نتایج این پژوهش در مجله Advanced Robotics Research منتشر شده است.
منبع: دیجینوی



